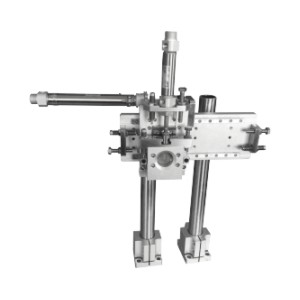
高速移栽机械手采用凸轮结构,通过控制凸轮轨迹曲线可以实现竖直给进、翻转、水平进给的工作循环,内置控制系统的步进马达与凸轮系统的组合形成了紧凑的单元,可实现控制其行程范围内任意位置停留,定位精度可达到0.02mm。